Declaration of CSG operations for implicit functions. More...
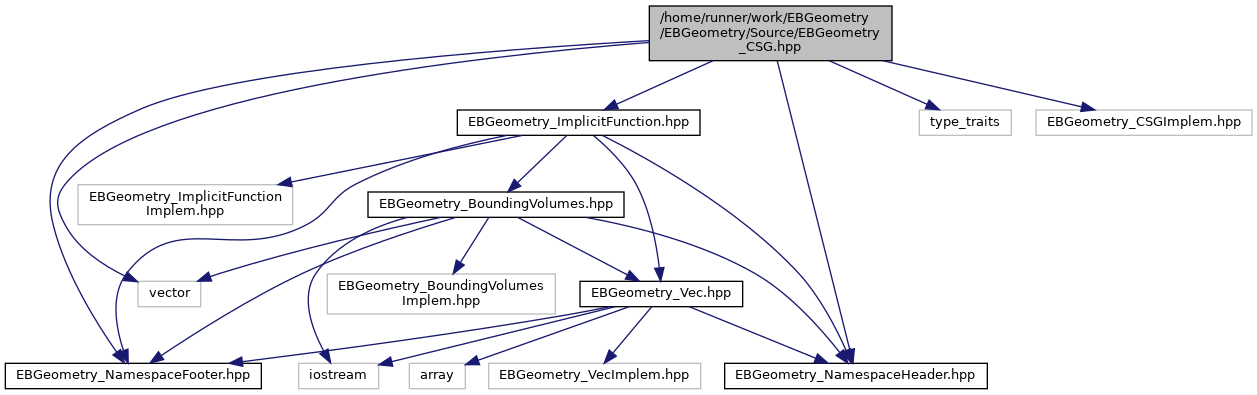
#include <algorithm>#include <cmath>#include <cstddef>#include <functional>#include <memory>#include <type_traits>#include <utility>#include <vector>#include "EBGeometry_BVH.hpp"#include "EBGeometry_ImplicitFunction.hpp"#include "EBGeometry_Macros.hpp"#include "EBGeometry_Vec.hpp"#include "EBGeometry_CSGImplem.hpp"
Include dependency graph for EBGeometry_CSG.hpp:
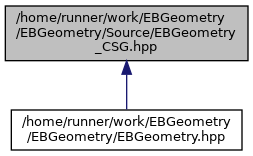
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | EBGeometry::UnionIF< T > |
| Implicit function whose interior is the union of all input function interiors. More... | |
| class | EBGeometry::SmoothUnionIF< T > |
| Implicit function whose interior is a smoothly blended union of all input function interiors. More... | |
| class | EBGeometry::BVHUnionIF< T, P, BV, K > |
| BVH-accelerated union of implicit functions. More... | |
| class | EBGeometry::BVHSmoothUnionIF< T, P, BV, K > |
| BVH-accelerated smooth union of implicit functions. More... | |
| class | EBGeometry::IntersectionIF< T > |
| Implicit function whose interior is the intersection of all input function interiors. More... | |
| class | EBGeometry::SmoothIntersectionIF< T > |
| Implicit function whose interior is a smoothly blended intersection of all input function interiors. More... | |
| class | EBGeometry::DifferenceIF< T > |
| Implicit function whose interior is the set difference A \ B. More... | |
| class | EBGeometry::SmoothDifferenceIF< T > |
| Implicit function representing a smoothly blended set difference A \ B. More... | |
| class | EBGeometry::FiniteRepetitionIF< T > |
| Implicit function that tiles a base function periodically within a finite repetition count. More... | |
Namespaces | |
| namespace | EBGeometry |
| Namespace containing all of EBGeometry's functionality. | |
Functions | |
| template<class T , class P = ImplicitFunction<T>> | |
| std::shared_ptr< ImplicitFunction< T > > | EBGeometry::Union (const std::vector< std::shared_ptr< P > > &a_implicitFunctions) |
| Constructs an implicit function whose interior is the union of the interiors of all input functions. | |
| template<class T , class P1 , class P2 > | |
| std::shared_ptr< ImplicitFunction< T > > | EBGeometry::Union (const std::shared_ptr< P1 > &a_implicitFunctionA, const std::shared_ptr< P2 > &a_implicitFunctionB) |
| Constructs an implicit function whose interior is the union of the interiors of A and B. | |
| template<class T , class P = ImplicitFunction<T>> | |
| std::shared_ptr< ImplicitFunction< T > > | EBGeometry::SmoothUnion (const std::vector< std::shared_ptr< P > > &a_implicitFunctions, const T a_smooth) |
| Constructs an implicit function whose interior is a smoothly blended union of all input function interiors. | |
| template<class T , class P1 , class P2 > | |
| std::shared_ptr< ImplicitFunction< T > > | EBGeometry::SmoothUnion (const std::shared_ptr< P1 > &a_implicitFunctionA, const std::shared_ptr< P2 > &a_implicitFunctionB, const T a_smooth) |
| Constructs an implicit function whose interior is a smoothly blended union of the interiors of A and B. | |
| template<class T , class P , class BV , size_t K> | |
| std::shared_ptr< ImplicitFunction< T > > | EBGeometry::BVHUnion (const std::vector< std::shared_ptr< P > > &a_implicitFunctions, const std::vector< BV > &a_boundingVolumes) |
| Constructs a BVH-accelerated union of implicit functions. | |
| template<class T , class P , class BV , size_t K> | |
| std::shared_ptr< ImplicitFunction< T > > | EBGeometry::BVHSmoothUnion (const std::vector< std::shared_ptr< P > > &a_implicitFunctions, const std::vector< BV > &a_boundingVolumes, const T a_smoothLen) noexcept |
| Constructs a BVH-accelerated smooth union of implicit functions. | |
| template<class T , class P > | |
| std::shared_ptr< ImplicitFunction< T > > | EBGeometry::Intersection (const std::vector< std::shared_ptr< P > > &a_implicitFunctions) |
| Constructs an implicit function whose interior is the intersection of the interiors of all input functions. | |
| template<class T , class P1 , class P2 > | |
| std::shared_ptr< ImplicitFunction< T > > | EBGeometry::Intersection (const std::shared_ptr< P1 > &a_implicitFunctionA, const std::shared_ptr< P2 > &a_implicitFunctionB) |
| Constructs an implicit function whose interior is the intersection of the interiors of A and B. | |
| template<class T , class P > | |
| std::shared_ptr< ImplicitFunction< T > > | EBGeometry::SmoothIntersection (const std::vector< std::shared_ptr< P > > &a_implicitFunctions, const T a_smooth) |
| Constructs an implicit function whose interior is a smoothly blended intersection of all input function interiors. | |
| template<class T , class P1 , class P2 > | |
| std::shared_ptr< ImplicitFunction< T > > | EBGeometry::SmoothIntersection (const std::shared_ptr< P1 > &a_implicitFunctionA, const std::shared_ptr< P2 > &a_implicitFunctionB, const T a_smooth) |
| Constructs an implicit function whose interior is a smoothly blended intersection of the interiors of A and B. | |
| template<class T , class P1 = ImplicitFunction<T>, class P2 = ImplicitFunction<T>> | |
| std::shared_ptr< ImplicitFunction< T > > | EBGeometry::Difference (const std::shared_ptr< P1 > &a_implicitFunctionA, const std::shared_ptr< P2 > &a_implicitFunctionB) |
| Constructs an implicit function whose interior is the set difference A \ B. | |
| template<class T , class P1 = ImplicitFunction<T>, class P2 = ImplicitFunction<T>> | |
| std::shared_ptr< ImplicitFunction< T > > | EBGeometry::SmoothDifference (const std::shared_ptr< P1 > &a_implicitFunctionA, const std::shared_ptr< P2 > &a_implicitFunctionB, const T a_smoothLen) |
| Constructs an implicit function representing a smoothly blended set difference A \ B. | |
| template<class T , class P = ImplicitFunction<T>> | |
| std::shared_ptr< ImplicitFunction< T > > | EBGeometry::FiniteRepetition (const std::shared_ptr< P > &a_implicitFunction, const Vec3T< T > &a_period, const Vec3T< T > &a_repeatLo, const Vec3T< T > &a_repeatHi) |
| Constructs a periodically tiled implicit function with finite extent. | |
Variables | |
| template<class T > | |
| std::function< T(const T &a, const T &b, const T &s)> | EBGeometry::ExpMin |
| Exponential smooth minimum for blending two signed-distance values. | |
| template<class T > | |
| std::function< T(const T &a, const T &b, const T &s)> | EBGeometry::SmoothMin |
| Quadratic polynomial smooth minimum for blending two signed-distance values. | |
| template<class T > | |
| std::function< T(const T &a, const T &b, const T &s)> | EBGeometry::SmoothMax |
| Quadratic polynomial smooth maximum for blending two signed-distance values. | |
Detailed Description
Declaration of CSG operations for implicit functions.